Рост автомобильного парка сопровождается насыщением городов средствами регулирования дорожного движения. Например, в Иркутске при населении 600 тыс. чел. количество светофорных объектов составило 70, а в городе Юджин (штат Орегон, США) при населении 140 тыс.– 180 тыс. Таким образом, насыщение городов средствами регулирования дорожного движения (ДД) может достичь и даже превышать уровень в один светофорный объект на 1000 жителей (http://www.ci.eugene.or.us/).
Одним из путей повышения качества проектирования таких объектов и режимов регулирования является уточнение расчетных характеристик потоков и использование рациональных методик. Проектирование регулируемых пересечений можно представить в виде схемы на рис. 1.
Рис.1. Процесс проектирования регулируемых пересечений
Как известно, для расчета цикла регулирования широко применяется формула Ф. Вебстера [11]:
![]() , (1)
, (1)
где С – длительность цикла регулирования, с; L – общее потерянное время за цикл (как правило, 2 – 3 с, умноженные на количество фаз в цикле регулирования), с; Yc = Σvci/sci –сумма фазовых коэффициентов; vci – интенсивность прибытия транспортных средств к регулируемому пересечению в критической группе движения в фазе (максимальное значение интенсивности в конкретной фазе регулирования), прив.ед/ч; sci – поток насыщения в критической группе движения в фазе, прив.ед/ч.
Для определения средней задержки в Highway Capacity Manual 2000 [8] принята модель (2):
 ,
(2)
,
(2)
где d – транспортная задержка в группе движения, с; T – длительность периода обследования, ч; С – длительность цикла регулирования, с; g – длительность зеленого времени в фазе, с; k – коэффициент, учитывающий тип светофорного регулирования (для случая жесткого регулирования принимается равным 0,5); I – коэффициент, учитывающий влияние предыдущего по ходу движения регулируемого пересечения на рассматриваемый (для изолированных пересечений принимается равным 1,0); X = v/c – отношение интенсивности прибытия транспортных средств к регулируемому пересечению к пропускной способности полос группы движения; с=sg/C – пропускная способность группы движения, прив.ед/ч.
Анализ формул (1,2) свидетельствует, что основными параметрами транспортного потока, влияющими на расчеты, являются интенсивность прибытия транспортных средств к регулируемому пересечению, а также поток насыщения, характеризующий интенсивность разъезда очереди транспортных средств после включения зеленого сигнала без потерь времени в начале и конце фазы регулирования.
Расчет цикла регулирования, а также величины задержки требует использования величины интенсивности прибытия v, приведенной к интенсивности движения легковых автомобилей, т.е. в прив.ед./ч. В соответствии с этим интенсивность прибытия определяется по формуле:
![]() ,
(3)
,
(3)
где ki – коэффициент приведения ТС i-го типа к легковому автомобилю, а Ni – кол-во автомобилей i-го типа в очереди.
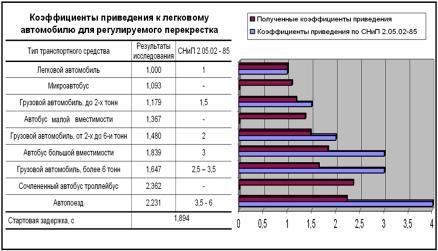
В нашей стране коэффициенты приведения к легковому автомобилю принимаются согласно классификации, представленной в СНиП 2.05.02-85 “Автомобильные дороги” [4]. При этом СНиП не рассматривает дифференцированно различные условия движения и предлагает постоянные коэффициенты приведения как для перегонов улиц, так и для различного рода пересечений.
| |
|
Рис. 2. Коэффициенты приведения к легковому автомобилю на регулируемом перекрестке и стартовая задержка |
Вместе с тем, специалисты разных стран признают, что для регулируемых пересечений необходимо использовать специальные коэффициенты приведения. Например, величины коэффициентов приведения, полученные Ю.А. Врубелем [2] и представленные в [4] отличаются на 30-80%.
Очевидно, что меньшие значения коэффициентов приведения приводят к снижению длительностей циклов регулирования на пересечениях тем самым, снижая величину транспортной задержки.
Анализ работ [5, 9] показал, что полученные коэффициенты приведения для прямонаправленного движения почти не отличаются от коэффициентов приведения при движении автомобилей налево или направо, по сравнению с отличием их от коэффициентов приведения по СНиП.
Тем не менее, авторы считают, что дальнейшие исследования должны быть направлены на определение ряда коэффициентов, которые учитывали бы пропускную способность элементов регулируемых пересечений в зависимости от состава транспортного потока, радиуса поворота, типа полосы движения и т.д., как это сделано в ряде зарубежных руководствах [7, 8, 10].
1. Афанасьев М.Б. и др. Условия введения различных режимов регулирования дорожного движения. – М.: Изд-во ВНИИ БД МВД СССР, 1976. – 319 с.
2. Врубель Ю.А. О потоке насыщения. Белорус. политех. ин-т. Минск,1988. – 7 с. – Рук. деп. в ЦБНТИ Минавтотранса РСФСР, № 663 – ат 89.
3. Кременец Ю. А., Печерский М.П. Инженерные расчеты в регулировании движением. – М.: Высшая школа, 1977. – 110 с.
4. СНИП 2.05.02 – 85 “Автомобильные дороги”// Минстрой России. – М.:ГУПЦПП, 1977. – 55 с.
5. Ahn Manfred. Veraenderung der Leistungsfaehigkeit staedtischer Hauptverkehrsstrassen ueber die Tageszeit. // Shriftenreihe, Lerstuhl fuer Verkerswesen Ruhr-Universitaet Bochum, HEFT 4, 1987, 143 p.
6. Branston D., Van Zulien H.J. The estimation of saturation flow, effective green time and passenger car equivalents at traffic signals by multiple liner regression. Transp. Res., 1987, v 12, p. 47 – 53.7. Handbuch fuer die Bemessung von Strassenverkehrsanlagen (HBS 2001). - Forshungsgesellschaft fuer Strassen und Verkehrswesen, Koeln, Januar 2002.
8. Highway Capacity Manual. // TRB, Washington, DC, 2000. – 1134 p.
9. Kockelman K.M. and Raheel A.S. Effect of vehicle type on the capacity of signalized intersections.–The University of Texas at Austin, 1999.- 23 p. http://www.ce.utexas.edu/prof/kockelman/public.html/ASCELDTShabih.pdf
10. Teply S., Allingham D., Richardson D., Stephenson B. Second Edition of the Canadian Capacity Guide for Signalized Intersections.// Institute of Transportation Engineers, District 7, Canada, 1995. – 115 p.
11. Webster F.V., Cobbe B.M. Traffic Signals | Road Research Technical Paper N56, HMSQ, London, 1966 – 111 p